




Scoprire come i robot soft imitano le caratteristiche dell’ambiente esterno e come utilizzano la capacità di deformarsi, a seconda del compito da svolgere, sono alcune delle prossime sfide che attendono uno degli ambiti di maggior successo della ricerca in robotica, descritte in un articolo “di prospettiva” pubblicato su Science dalla scienziata italiana Cecilia Laschi (Istituto di BioRobotica della Scuola superiore Sant’Anna di Pisa), considerata una dei maggiori esperti a livello mondiale di “soft robotics”.
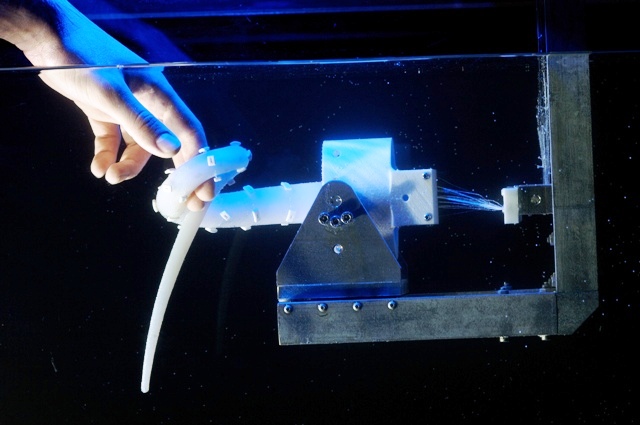
La robotica soft è uno dei trend attuali di sviluppo della robotica, è fortemente ispirata dagli esseri viventi, ne sfrutta le proprietà dei tessuti morbidi per ottenere nei robot abilità che ne permetteranno un migliore impiego nella vita quotidiana, al fianco dell’uomo. “Octopus”, il progetto europeo che ha portato allo sviluppo del primo robot soft al mondo ispirato alla destrezza del polpo, è stato infatti coordinato da Cecilia Laschi. I robot soft possono deformarsi per adattarsi meglio all’ambiente, possono schiacciarsi per passare in spazi ridotti o allungarsi per raggiungere un oggetto da afferrare, possono evolversi e crescere e, come dimostrato da una recente pubblicazione sempre su Science del gruppo dello scienziato statunitense Rob Shepherd (Cornell University), possono mimetizzarsi non soltanto cambiando colore, ma anche formando una serie di protuberanze sulla superficie esterna, a imitazione dell’ambiente circostante.
Le ulteriori sfide da affrontare in questo campo riguardano la comprensione dei meccanismi con cui le caratteristiche dell’ambiente esterno vengono percepite per poi imitarle e in generale lo studio dei i processi cognitivi che permettano ai robot soft di utilizzare le proprie capacità di deformarsi, a seconda del compito da svolgere.
Cecilia Laschi è stata uno dei valutatori della pubblicazione Rob Shepherd, che ha presentato una sorta di pelle artificiale soft, che può mimetizzarsi cambiando colore e forma della sua superficie. Nei video forniti a supporto del paper, si vede come essa possa assumere forma e colore di alcuni ciottoli grigi, confondendosi con essi, come può assume la forma di una pianta grassa. Lo studio di Rob Shepherd è blandamente ispirato alla pelle dei cefalopodi, come polpo e seppia, che oltre a cambiare colore può assumere, nel caso del polpo, la stessa rugosità delle rocce circostanti. Dopo aver valutato il paper dello scienziato della Cornell University, Cecilia Laschi è stata invitata da Science a scrivere l’articolo “di prospettiva” sullo stato dell’arte della ricerca in “soft robotics”, pubblicato oggi.
“Il crescente numero di pubblicazioni su Science la rivista scientifica per eccellenza, di articoli sulla robotica soft dimostra – commenta Cecilia Laschi - come la ricerca in questa area produca sempre più risultati importanti, grazie anche alla sua natura interdisciplinare, ai quali l’Europa e l’Italia in particolare danno un contributo sostanziale”.



Notizie correlate

Nuova area degenze a Pisa, si chiude il progetto di potenziamento nella robotica
Con la nuova area della degenza del Centro multidisciplinare di Chirurgia robotica mini-invasiva, riservata ai pazienti dell’area vasta nord-ovest e alle pazienti ginecologiche dell’Aoup, arriva a completamento il progetto di [...]

Neurostimolazione periferica, medici russi in visita alla Terapia del dolore dell'Aoup
Una delegazione di medici provenienti da Mosca è venuta in visita alla Sezione dipartimentale di Anestesia e terapia del dolore dell’Aoup diretta dalla dottoressa Adriana Paolicchi per acquisire nuove modalità [...]

Vaccinazione per la poliomielite, raccolta fondi a Madonna dell'Acqua
Iniziativa a Pisa per sostenere le vaccinazioni contro la poliomielite. Si tratta di una raccolta fondi che verrà effettuata presso la Conad di Madonna dell’Acqua, da venerdì 15 a domenica [...]
Tutte le notizie di Pisa
<< Indietro
